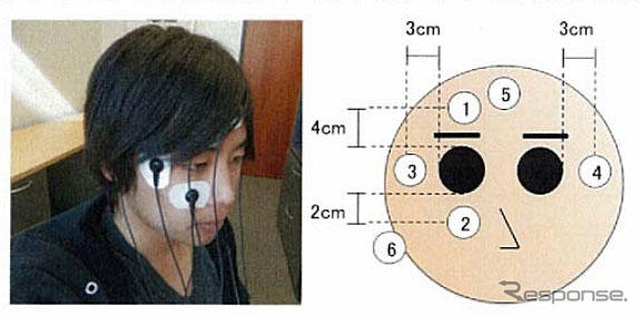
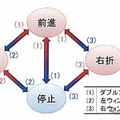
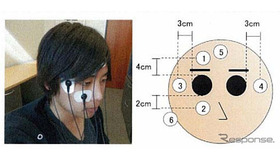
慶應義塾大学は7月23日、理工学部システムデザイン工学科満倉靖恵准教授、高橋正樹准教授の合同研究グループが、目の周りの電位(眼電位)をコントローラとする車いす自動走行装置を開発したと発表した。今回開発した車いすは、目の回りに装着した少数の電極から眼電位を計測。3種類のまばたきを高精度に検出し、車いすの方向入力に応用した。また、通路や曲がり角などの環境情報を検出。環境に応じて走行速度や旋回角を自動調整する制御機構を組み合わせることで、安心・安全かつ円滑に走行できる装置となっている。合同研究グループでは、装置の小型化・低価格化を進めるとともに、より多くの環境に適応できる制御機構を導入。今回発表した車いす自動走行装置の実用化を目指していく。