advertisement
advertisement
新エネルギー・産業技術総合開発機構(NEDO)は1月11日、ダブル技研と都立産業技術高専と共同で人間の手や指の微妙な動きを再現した新構造のロボットハンドを開発したと発表した。
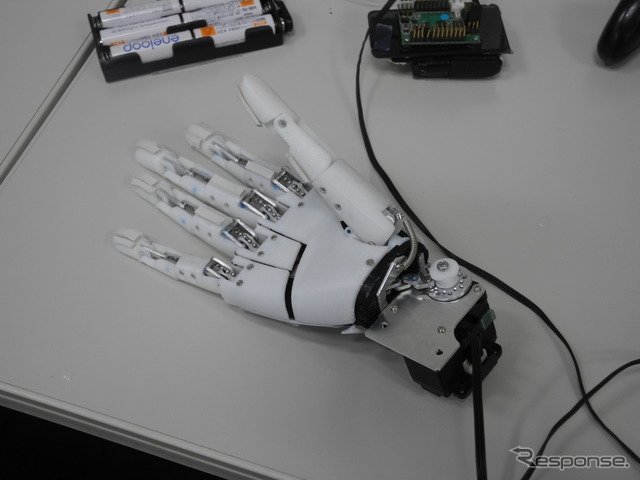







NEDO、産学官連携で新構造のロボットハンドを開発…人間の手と指の動きを再現
《山田清志@レスポンス》

Language